CVPR文章
@misc{wang2018occlusion,
title={Occlusion Aware Unsupervised Learning of Optical Flow},
author={Yang Wang and Yi Yang and Zhenheng Yang and Liang Zhao and Peng Wang and Wei Xu},
year={2018},
eprint={1711.05890},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
分别求出前向光流和后向光流,通过前向光流进行重建后向光流 $\widetilde{I}_1$
向后流用于通过前向翘曲产生遮挡贴图$(O)$
photometric loss 光度损失:相当于求两个图片中所有点的相似性。
smoothness loss 正则化平滑:仅基于光度损失的无监督学习对于无纹理的地方是模糊的。减少模糊度最常用的方法就是平滑正则化smoothness loss函数。
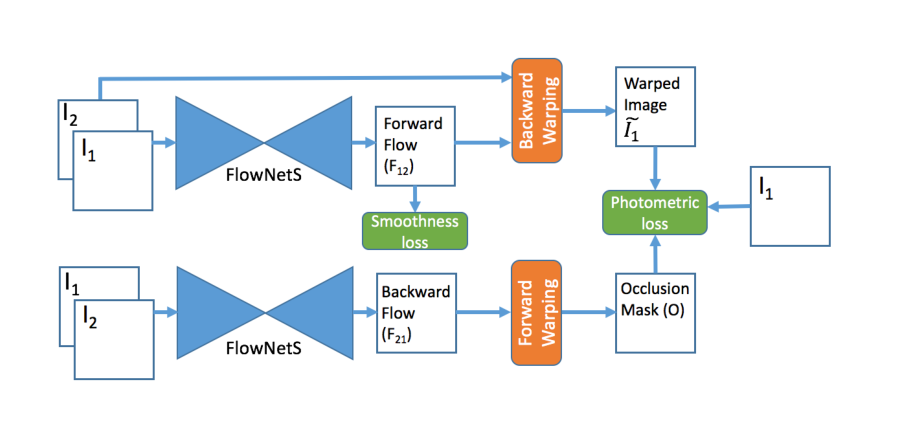
文章提高了一种端到端的无监督学习框架,可以训练为标记视频的光流信息。主要参考了FlowNets模型,做出了一定的改进。
可用思路:将FlowNets模型用于我们实验室的PWC-Net模型。其他地方基本可以不用做改变。可以看看后面其他论文改进的部分。
@inproceedings{liu2020learning,
title = {Learning by Analogy: Reliable Supervision from Transformations for Unsupervised Optical Flow Estimation},
author = {Liu, Liang and Zhang, Jiangning and He, Ruifei and Liu, Yong and Wang, Yabiao and Tai, Ying and Luo, Donghao and Wang, Chengjie and Li, Jilin and Huang, Feiyue},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition(CVPR)},
year = {2020}
}
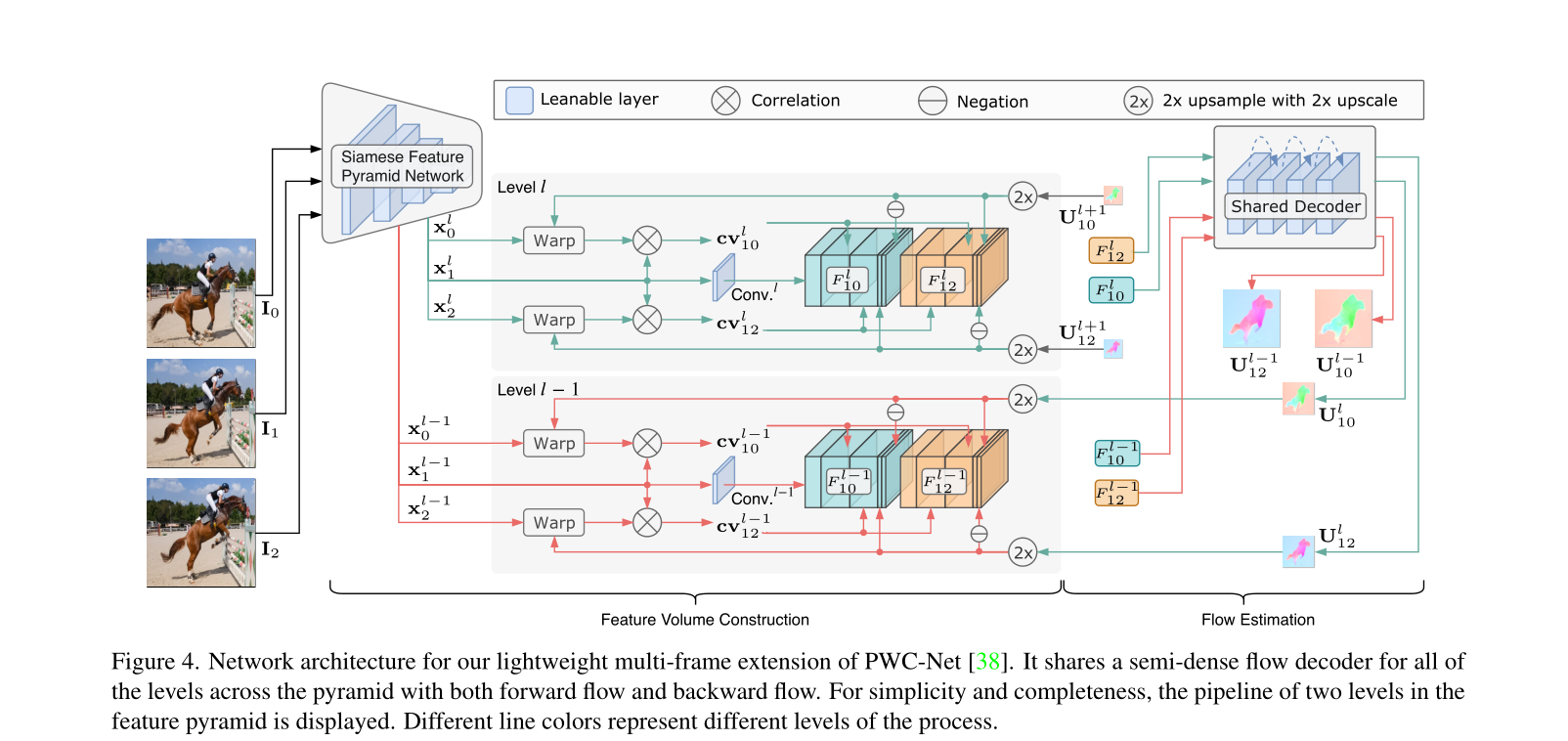
和上一个网络有一定的差别 以PWC-Net
网络图:
 成功在自己笔记本上实现部署模型并且测试代码:
成功在自己笔记本上实现部署模型并且测试代码:
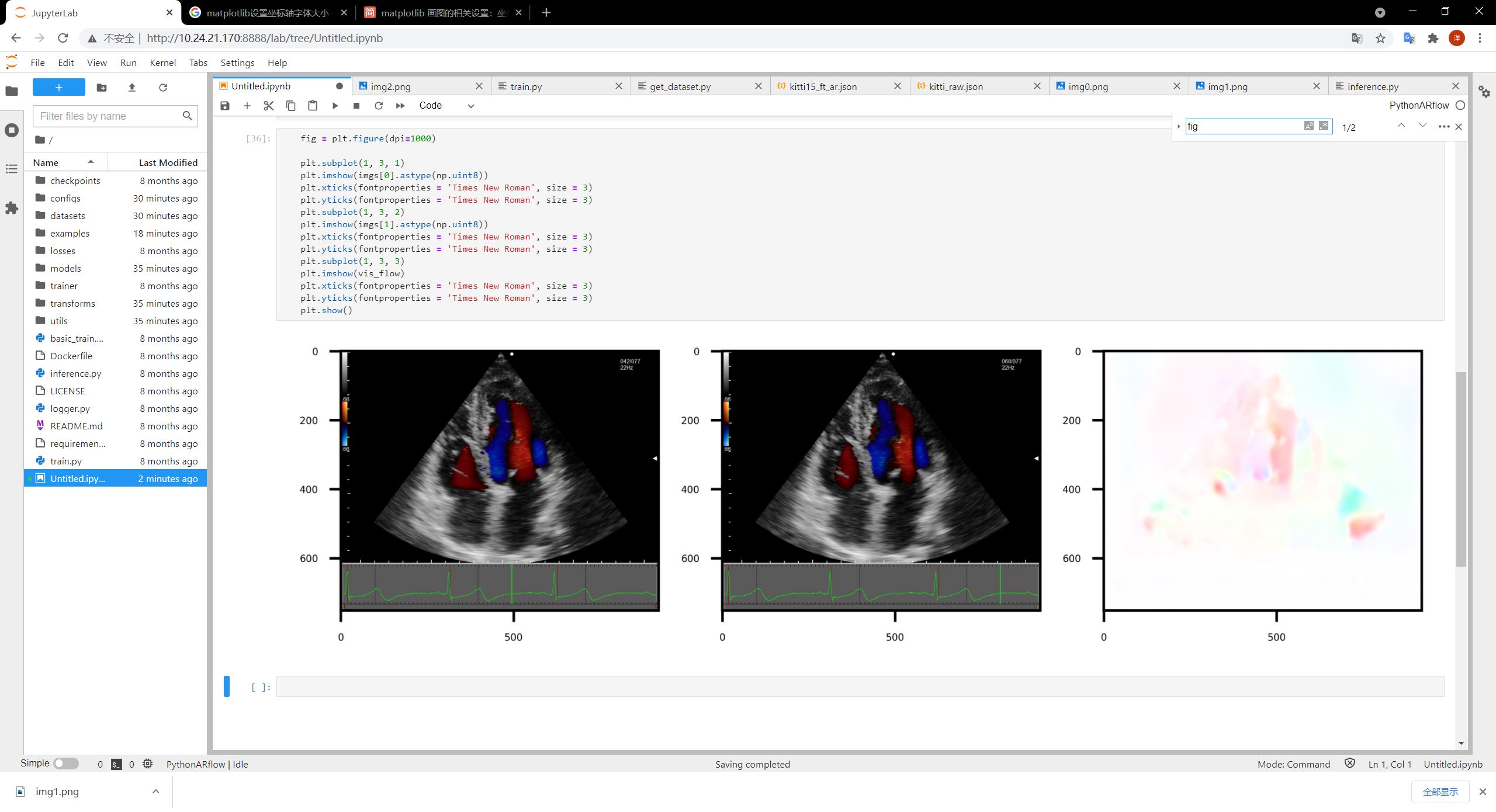 模型部署比较麻烦。需要在cuda9.0上运行。
思路同样可以借鉴。并且可以直接将超声B模式的图像整理以后直接拿去训练。
模型部署比较麻烦。需要在cuda9.0上运行。
思路同样可以借鉴。并且可以直接将超声B模式的图像整理以后直接拿去训练。
** What Matters in Unsupervised Optical Flow**
@article{DBLP:journals/corr/abs-2006-04902,
author = {Rico Jonschkowski and
Austin Stone and
Jonathan T. Barron and
Ariel Gordon and
Kurt Konolige and
Anelia Angelova},
title = {What Matters in Unsupervised Optical Flow},
journal = {CoRR},
volume = {abs/2006.04902},
year = {2020},
url = {https://arxiv.org/abs/2006.04902},
archivePrefix = {arXiv},
eprint = {2006.04902},
timestamp = {Fri, 12 Jun 2020 14:02:57 +0200},
biburl = {https://dblp.org/rec/journals/corr/abs-2006-04902.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
这篇论文主要对Unsupervised Optical Flow涉及到的一些常见模块进行实验分析,有很好的指导意义。